Vinum Project
This project tackles the emerging challenge of the dramatic shortage in skilled labor and lower grape prices using robotic solutions. Robots are a revolutionary upscaling in the Agri-Food sector for their precision and efficiency.
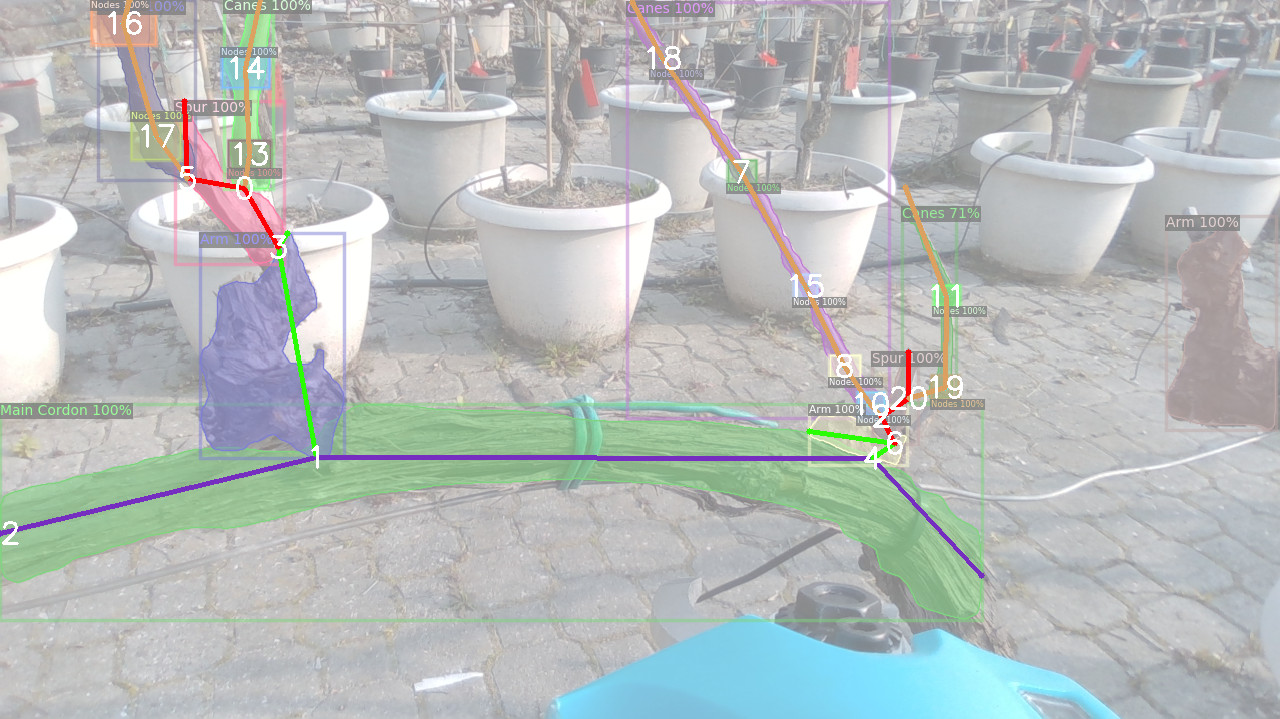
The main goal of this project is to develop and test innovative robotic mobile manipulation technologies for grapevine winter pruning automation.